Working with 3D transformation matrices and Euler angles can be a little confusing with all that complex mathematical calculations. I found the Apply Transformation tool in CloudCompare to be useful in helping to calculate the Euler angles i.e. roll, pitch, and yaw given the transformation matrix, or vice versa.
To use the tool the find the roll, pitch and yaw, you can do the following:
- Start up CloudCompare. Load a point cloud file and select it in the tree pane.

- Next, select Edit > Apply transformation.
The Apply transformation dialog box appears.
- Type in the transformation matrix you want to determine the Euler angles.

- Then click the Euler angles tab.
The calculated angles are displayed as Phi (yaw), Theta (pitch) and Psi(roll).



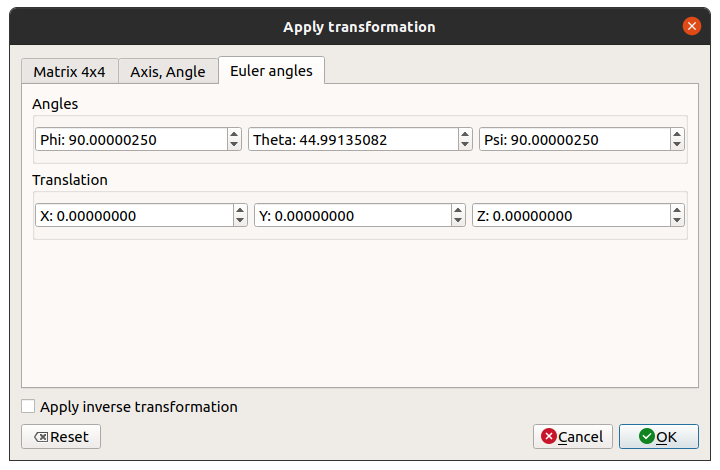
To determine the transformation matrix from the Euler angles, just type in the yaw, pitch, and roll values in the Phi, Theta and Psi fields. Then click the Matrix 4x4 tab.